Accurate, Flexible Stereo Vision
Stereo Vision
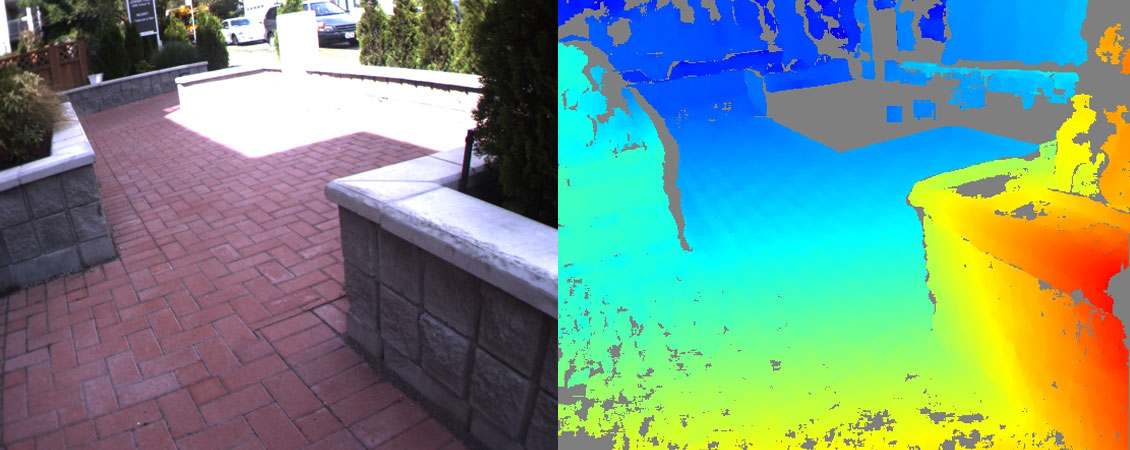
FLIR has made stereo vision practical for a variety of research areas by providing hardware and software packages that include complete stereo processing support – from image correction and alignment to dense correlation-based stereo mapping. Stereo vision works in a similar way to 3D sensing in human vision. It begins with identifying image pixels that correspond to the same point in a physical scene observed by multiple cameras. The 3D position of a point can then be established by triangulation using a ray from each camera. The more corresponding pixels identified, the more 3D points that can be determined with a single set of images. Correlation stereo methods attempt to obtain correspondences for every pixel in the stereo image, resulting in tens of thousands of 3D values generated with every stereo image.
Calibration Quality & Image Rectification
FLIR Stereo Vision cameras are factory-calibrated for lens distortion and camera misalignments, to ensure consistency of calibration across all cameras and eliminate the need for in-field calibration. During the rectification process, epipolar lines are aligned to within 0.05* pixels RMS error. Calibration results are stored on the camera, allowing the software to retrieve image correction information without requiring camera-specific files on the host computer. This allows seamless swapping of cameras and easy use of multi-camera systems. The camera case is also specially designed to protect the calibration against mechanical shock and vibration.
Images can be rectified to any image size, making it easy to change the resolution of stereo results depending on speed and accuracy requirements. Camera calibration and rectification are key to getting high quality disparity images from a stereo camera.



Triclops SDK
The Triclops™ Software Development Kit (SDK) is included with all FLIR IEEE-1394 Stereo Vision products and is used to provide real-time depth range images using stereo vision technology.
Learn More